
MULTIVARIABLE PID CONTROL OF A TWO-DEGREE-OF-FREEDOM HELICOPTER PROTOTYPE USING EVOLUTIONARY ALGORITHMS
DOI:
https://doi.org/10.5281/zenodo.7582520Abstract
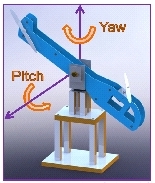
The development of helicopter control applications represents a great challenge due to its several degrees of freedom, its predominantly non-linear dynamics and the strong coupling between its variables. To tackle this problem, a scale prototype of a two-degrees-of-freedom (2-DOF) helicopter was built using low-cost materials and open source technologies (Arduino and Scilab / Xcos). The prototype model is obtained with the MATLAB systems identification toolbox and then the interaction between the system variables is analyzed. As a control strategy, ideal PID-2GdL controllers with first order filter and static decoupling were used. The controllers were tuned to the evolutionary algorithms: particle swarm optimization (PSO) and cuckoo search (CS), minimizing by batch simulation a multiobjective function that contemplated the performance indices IAE and IAU. The best models identified in open-loop with the prediction error method (PEM) presented Box Jenkins and ARMAX structures with a moderate precision, which yielded the minor errors during the estimation and validation. The applied control technique allows obtaining PID controllers with excellent performance, low variability, adequate robustness for reference tracking and load disturbance rejection with a minimum error in steady state and an acceptable control effort.Downloads
Download data is not yet available.
Downloads
Published
2022-12-22
How to Cite
Villalonga, R., Parraguez , L., Rengel, J. E., & Navarro, D. (2022). MULTIVARIABLE PID CONTROL OF A TWO-DEGREE-OF-FREEDOM HELICOPTER PROTOTYPE USING EVOLUTIONARY ALGORITHMS. LatinAmerican Journal of Metallurgy and Materials, 6–11. https://doi.org/10.5281/zenodo.7582520
Issue
Section
Supplementary Articles
License
The authors of papers accepted for publication by the RLMM, should recognize the complete transfer of copyright (in all languages) to the RLMM. This transfer includes the right by the RLMM to adapt the article for digital or printed reproduction without altering the written content and information displayed in tables or figures within. The authors retain the copyright and guarantee the journal the right to be the first publication of the work as well as licensed under a Creative Commons Attribution License 4.0 Internacional (CC BY 4.0) which allows others to share the work with an acknowledgment of the authorship of the work and the initial publication in this journal.




